Merhaba arkadaşlar bugün yeni bir projemi sizlerle paylaşacağım.Projemizde rf alıcı verici ile uzaktan kumandalı arabanın nasıl yapılabileceğini anlatacağım.
İlk önce alıcı ve vericiden bahsedelim.Alıcı ve verici olarak udea firmasının ürettiği ARX-34B2 ve
ATX-34S rf modüllerini kullandım.
 ARX-34B2
ARX-34B2























Proje dosyalarına aşağıdan ulaşabilirsiniz.
Alıcı-Verici Dosyaları
İsis_dosyası
İlk önce alıcı ve vericiden bahsedelim.Alıcı ve verici olarak udea firmasının ürettiği ARX-34B2 ve
ATX-34S rf modüllerini kullandım.
ATX-34S
Alıcı ve vericimizin çalışma ferkansı 433.920MHz'dir.ARX-34B2 ve ATX-34S sayesinde radyo frekansı ile bilgi taşıyoruz.Bilgi vericiden alıcıya kare dalga şeklinde taşınır.Verici üzerinde DIN pini bulunur.Bu pin RF ile gönderilecek sinyallerin kullanıcı tarafından verildiği giriştir.Gönderilen datanın sırası şu şekildedir.
TX=preamble + sencron + data1+.....+dataX

Preamble ilk olarak uyku durumunda bulunan alıcıyı uyandırmak için kullanılan bir koddur.Sencron ise preambleden sonra gönderilen bir datadır ve bilgi başlangıcının doğru iletilmesi için kulanılması gereklidir.Bizde programda sencronu 'X' karakteri olarak kullandık.Ayrıca bunun ne olacağına kişi kendiside karar verebilir.Sencron gönderildikden sonra ise asıl data gönderilir yine bunun ne olacağına kişi kendisi karar verebilir.Biz programda 'A' , 'B' , 'C' gibi karakterler kullandık.Tabi datamız mutlaka karakter olmak zorunda değildir bir sayıda olabilir.
Birazda alıcı kısımdan bahsedelim.Alıcımızda yani ARX-34B2 üzerinde DOUT pini bulunur.Bu pin mikroişlemciye bağlanır.Alıcıya gelen datalar çözümlenerek bu pin üzerinden pice gider.Ve bu gelen datalara göre picde belirli işlemler yerine getirilir.Bir diğer önemli nokta ise alıcı kısımda preambleye bakılmaz sadece sencron aranır ardından da datalar okunur.Alıcı ve vericinin datasheetlerinide aşağıya bırakıyorum incelemekte büyük fayda var.
Arabamızda dc ve step motor olmak üzere iki farklı motor kullandık.Dc motor arabamızın ileri ve geri gitmesini sağlarken step motor ise belirli açılarla yönlendirilerek arabanın sağ,sol ve düz konumda istikametlenmesini sağlıyor.Dc motorumuz 12v 1500Rpm'dir.Direksiyon görevi yapan motor ise 7.5 derece adım açısına sahip 5 uçlu unipolar step motordur.
Step motorun çalışma mantığından bahsedecek olursak.Step(adım) motor adında anlaşılacağı gibi adım adım hareket eden motordur.Bu adım adım hareketler motorun uçlarına sıra sıra enerji verilmesiyle sağlanır.

Unipolar step motorlarda genelde 5 veya 6 kablo bulunur.5 kablolu step motorlarda bir,6 kablolu step motorlarda ise iki kablo ortak uçtur.Bu ortak uçlar kaynağın pozitif kutbundan beslenir.Bu ortak uçlar ohm metre yardımı ile bulunur.Step motorların (5 veya 6 kablolu fark etmez) uçları ikili ikili ohm metre ile ölçülür tüm uçlar arasında eşit dirence sahip olan uç ortak uçtur.
Alıcı olarak görev yapan arabanın üzerinde bulunan alıcı devre ve verici olarak kullandığımız kumanda devresi olmak üzere iki adet baskı devremiz var.
Alıcı kart üzerinde bulunan önemli elemanları anlatalım.Dc motor sürücü olarak L298 kullandık.L298 motor sürücüyü, bir önceki projemiz olan ds18b20 sıcaklık sensörü ile fan hız kontrolü projesinde anlatmıştık.Yinede kısaca değinelim.L298 motor sürücüsünün 15 ayağı bulunmaktadır.L298 ile bir çift dc motor sürülebilir fakat biz bir adet dc motor kullandığımız için sadece tek motor sürdük.Bundan dolayı motor sürücünün bazı pinlerini kullanmadık.Sadece enable1, input1, input2, output1 ve output2 pinlerini kullandık.Programda ise sadece CCP1 modülünü kullandık.Motor sürücünün enable1 pini picin CCP1 pinine bağlanır.CCP1 modülünden gelen belli oranda pwm duty'leri ile sürücünün output uclarındaki motorun hız kontrolü sağlanır.L298 motor sürücü ve pin
konfigürasyonu aşagıdaki gibidir.

Step motoru sürmek için ULN2003A entegresini kullandık.
Ben step motor sürücünün giriş pinlerini 16F877A'nın B portuna bağladım.

Alıcı kart üzerindeki önemli olan elemanlar bu kadar.Birazda Verici kart üzerindeki elemanlardan bahsedelim.Verici kartımızın üzerinde arabayı sağa,sola,ileri ve geriye hareket ettirmek için joystick kullandık.Joystickin içinde iki adet trimpot ve bir adet button bullunmaktadır.Bu trimpotlardan biri X doğrultusunda diğeri ise Y doğrultusundadır.Bu trimpotların 1.ucuna gnd,3. ucuna ise +5 volt bağlantısını yaptık.2.bacak olan orta bacakları ise 16F877A picimizin A portu üzerindeki analog girişlere bağladık.Yani analog dijital çevirici kullandık.Joystickin hareket etmesiyle analog girişlere giden voltaj değerleri değişir.Voltaj analog bir değerdir bizim bunu dijitala çevirmemiz gerekir.Bunun içinde program içerisinde adc kullanmamız gerekir.Program içerisinde dijital değeri elde ettikten sonra bu değerlere göre dc motorumuzun hızını pwm duty modülü ile ayarlıyoruz.Yine bu dijital değerlere göre step motorumuzun konumunu değiştiriyoruz.Ccs c kodlarını aşağıya bırakıcam incelerseniz daha iyi anlarsınız.Verici kart üzerinde birde toggle anahtar kullandık.Toggle anahtar vites görevi görmektedir. Birde çeşitli anahtar ve buttonlar kullandık.Bunlarıda arabanın farlarını ve kornasını kontrol etmek için kullandık.
Şimdide alıcı-vericinin genel isis devresine bakalım.
VERİCİ KODU:
/////
#include "C:\Documents and Settings\İlçin\Desktop\verson\sonver.h"
void main()
{
int adc1,adc0;
setup_adc_ports(ALL_ANALOG);
setup_adc(ADC_CLOCK_INTERNAL);
setup_psp(PSP_DISABLED);
setup_spi(SPI_SS_DISABLED);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_1);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DISABLED,0,1);
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
while(true){
set_adc_channel(0);
delay_us(10);
adc0=read_adc();
set_adc_channel(1);
delay_us(10);
adc1=read_adc();
if(adc1>=0&&adc1<=48){
putc(0b01010101);
putc('X');
putc('A');
delay_ms(50);}
if(adc1>48&&adc1<=96){
putc(0b01010101);
putc('X');
putc('B');
delay_ms(50);}
if(adc1>96&&adc1<=160){
putc(0b01010101);
putc('X');
putc('C');
delay_ms(50);}
if(adc1>160&&adc1<=208&&(input(pin_d1)==0)){
putc(0b01010101);
putc('X');
putc('D');
delay_ms(50);}
if(adc1>208&&adc1<=256&&(input(pin_d1)==0)){
putc(0b01010101);
putc('X');
putc('E');
delay_ms(50);}
if(adc1>160&&adc1<=208&&(input(pin_d1)==1)){
putc(0b01010101);
putc('X');
putc('F');
delay_ms(50);}
if(adc1>208&&adc1<=256&&(input(pin_d1)==1)){
putc(0b01010101);
putc('X');
putc('G');
delay_ms(50);}
if(adc0>=0&&adc0<=96){
putc(0b01010101);
putc('X');
putc('L');
delay_ms(50);}
if(adc0>96&&adc0<=160){
putc(0b01010101);
putc('X');
putc('K');
delay_ms(50);}
if(adc0>160&&adc0<=256){
putc(0b01010101);
putc('X');
putc('H');
delay_ms(50);}
if(input(pin_d0)==1){
putc(0b01010101);
putc('X');
putc('M');
delay_ms(50); }
if(input(pin_d0)==0){
putc(0b01010101);
putc('X');
putc('N');
delay_ms(50); }
if(input(pin_c3)==1){
putc(0b01010101);
putc('X');
putc('O');
delay_ms(50);}
if(input(pin_c3)==0){
putc(0b01010101);
putc('X');
putc('P');
delay_ms(50); }
}
}
/////
ALICI KODU:
/////
#include "C:\Documents and Settings\İlçin\Desktop\alson\sonal.h"
void ileri1_vites1();
void ileri2_vites1();
void ileri1_vites2();
void ileri2_vites2();
void geri1();
void geri2();
void durma();
void main()
{ int dogrult=0;
char data;
setup_adc_ports(NO_ANALOGS);
setup_adc(ADC_OFF);
setup_psp(PSP_DISABLED);
setup_spi(SPI_SS_DISABLED);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_1);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DIV_BY_16,100,1);
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
set_tris_a(0x00);
set_tris_b(0x09);
set_tris_d(0x00);
output_a(0x00);
output_b(0x00);
output_d(0x00);
setup_CCP1(CCP_PWM);
set_pwm1_duty(0);
while(true){
if(getch()=='X'){
data=getch();
if(data=='A') geri1();
if(data=='B') geri2();
if(data=='C') durma();
if(data=='D') ileri1_vites1();
if(data=='E') ileri2_vites1();
if(data=='F') ileri1_vites2();
if(data=='G') ileri2_vites2();
if(data=='L'&&dogrult==0) {
dogrult=1;
output_b(0x01);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x09);
delay_ms(30);
}
if(data=='H'&&dogrult==0) {
dogrult=2;
output_b(0x09);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x01);
delay_ms(30);
output_b(0x09);
delay_ms(30);
}
if(data=='K'&&dogrult==1) {
dogrult=0;
output_b(0x09);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x01);
delay_ms(30);
output_b(0x09);
delay_ms(30);
}
if(data=='K'&&dogrult==2){
dogrult=0;
output_b(0x01);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x09);
delay_ms(30);
}
if(data=='H'&&dogrult==1){
dogrult=2;
output_b(0x09);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x01);
delay_ms(30);
output_b(0x09);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x01);
delay_ms(30);
output_b(0x09);
delay_ms(30);
}
if(data=='L'&&dogrult==2){
dogrult=1;
output_b(0x01);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x09);
delay_ms(30);
output_b(0x01);
delay_ms(30);
output_b(0x03);
delay_ms(30);
output_b(0x02);
delay_ms(30);
output_b(0x06);
delay_ms(30);
output_b(0x04);
delay_ms(30);
output_b(0x0C);
delay_ms(30);
output_b(0x08);
delay_ms(30);
output_b(0x09);
delay_ms(30);}
if(data=='M') output_high(pin_d2);
if(data=='N') output_low(pin_d2);
if(data=='O') output_high(pin_d3);
if(data=='P') output_low(pin_d3);
}
}
}
void ileri1_vites1(){
output_low(pin_a0);
output_high(pin_a1);
set_pwm1_duty(30);
}
void ileri2_vites1(){
output_low(pin_a0);
output_high(pin_a1);
set_pwm1_duty(50);
}
void ileri1_vites2(){
output_low(pin_a0);
output_high(pin_a1);
set_pwm1_duty(75);
}
void ileri2_vites2(){
output_low(pin_a0);
output_high(pin_a1);
set_pwm1_duty(100);
}
void geri1(){
output_high(pin_a0);
output_low(pin_a1);
set_pwm1_duty(80);
}
void geri2(){
output_high(pin_a0);
output_low(pin_a1);
set_pwm1_duty(40);
}
void durma(){
output_high(pin_a0);
output_low(pin_a1);
set_pwm1_duty(0);
}
/////
Kodlar çok karışık değil biraz incelerseniz kısa sürede anlayabilirsiniz.Anlayamadığınız yer olursa yardımcı olabilirim.
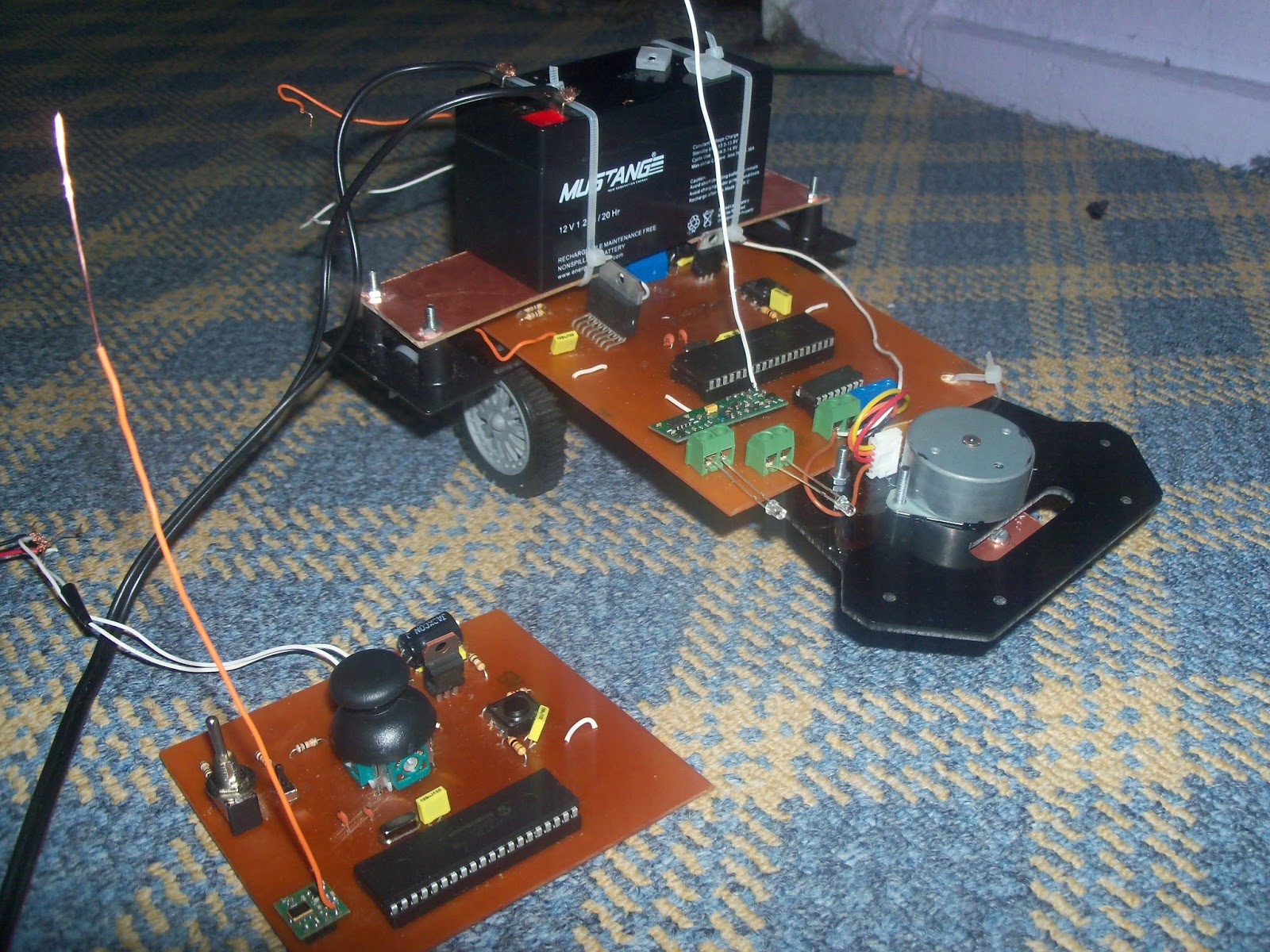
Projemizin bitmiş hali aşağıdaki video ve resimlerdeki gibidir.












Proje dosyalarına aşağıdan ulaşabilirsiniz.
Alıcı-Verici Dosyaları
İsis_dosyası
PROJEDE KULLANILAN MALZEMELER:
**Kumandada (Verici) Kullanılan Malzemeler**
-PİC16F877A
-ATX-34S rf verici modül
-4MHz kristal
-22pF kondansatör
-100nF ve 470uF kondansatör
-7805 transistör
-Joystick
-Toggle anahtar
-Buton
-10K direnç
-1K direnç
-330ohm direnç ve led
-Klemens
**Arabada (alıcı) Kullanılan Malzemeler**
-PİC16F877A
-ARX-34B2 rf alıcı modül
-4MHz kristal
-22pF kondansatör
-100nF ve 470uF kondansatör
-7805 transistör
-L298 Dc motor sürücü
-12v 1500Rpm DC motor
-ULN2003A entegresi (Step motor sürmek için)
-Unipolar step motor(M35SP-7NP)
-330ohm direnç ve led
-Buton
-Klemens
-Buzzer (arabanın kornası)
Proje çalışmaları sırasında yardımlarını esirgemeyen Muhammed İçen,Hasan Tunay ve Mustafa Erek arkadaşlarıma teşekkür ederim.İlgilenen arkadaşlara kolay gelsin.Başarılar dilerim...
çalışmanızı takip ediyorum ve ilgimi çekti. ama bir kaç parçayı bulamadm yardmcı olur musun
YanıtlaSilÇalışmam ile ilgilendiğiniz için teşekkür ederim öncelikle.Tabi yardımcı olurum hangi parçaları bulamadınız.
YanıtlaSilinternetten alacağım malzemeleri 12 v 1500rpm motor mesela sitelere baktım ama bundan blamadım, he birde plaketin ebatları kaçakaç
YanıtlaSilhttp://www.robotistan.com/Runner-12V-16mm-1500Rpm-Reduktorlu-DC-Motor,PR-1314.html
YanıtlaSil12V 1500 rpm motoru buradan aldım.
Plaketin ebatını areste baskı devresini çizdikten sonra çizime göre belirledim.Sizin devre çiziminizi görmeden ebatı hakkında bişey söyleyemem.
Step motoruda robotistandan bulabilirsin ben burdan aldım.
Abi baski devresini nasil yaptigi dair bi video hazırlar. Misin
SilHocam öncelikle tesekkur ederim iyi paylasim ben iki pic arasında önce rf iletişim yapicam programim tipki sizinki gibi motor kisimlari hariç fakat piclerin rx tx uclarini bagladigimda uygun calisan devrem alici verici modülü bagladigimda alici modül kendi kendine saçma sapan is yapiyo acaba ATX 34 ve Arx 34 denesem ayni sorun olurmu
YanıtlaSilİlginize teşekkür ederim.Bende alıcı vericiyi bağlamadan önce doğrudan RX ile TX pinlerini birbirine bağlıyarak bi uygulama yapmıştım çalışmıştı.Daha sonra ATX 34 ile ARX 34 ün pic ile bağlantısını yapıp öyle bi uygulama yaptım yine iyi sonuç almıştım. Siz hangi alıcı-verici modülünü kullanıyosunuz.Birde programda alıcı ile verici kısmın baud hızlarını aynı yapmanız gerekir.
YanıtlaSilEser kardeş malzeme listesini verebilir misin.Ben baktım biraz ama kristal mesela kaç mhz .
YanıtlaSilMalzeme listesini sayfaya ekledim az önce Sinan kardeş.
YanıtlaSil:) TEŞEKKÜR EDERİM.Kusura bakma senide rahatsız ediyorum :)
YanıtlaSilOlur mu öyle şey ne rahatsızlığı,size yardımcı olabiliyorsam ne mutlu...
YanıtlaSilAbi bende bisey sorabilir miyim ?
YanıtlaSilBendede Bitane 40 Mhz lik 2 vitesli araba var . Ancak gecen gun icinde lambalarin kablosunun şasesi sonucu arac saga dönmuyor ..:( Sola donuyo saga donmuyo hic hareket yok .İleri geri vitesler falan hepsi calisiyor. Tek sorun saga donmemeso bunun sebebi herhangi bir elemanin yanmis olmasi olabilir mi ? Eger olursa hangi eleman kartin resmini atarsam daha yardimci olabilir misin ? Cok tesekkurler.
YanıtlaSilSizin arabada sağa sola dönmeyi step motormu sağlıyor yoksa dc motorlar arasındaki hız farkı ile mi sağa sola dönmeyi sağladınız.Devrede ne kullandınız onları söylerseniz yada devre şemasını gönderirseniz size yardımcı olmaya çalışırım.Bende teşekkür ederim.
YanıtlaSilAbi sagol ben hallettim . Ama size bisey soracaktim . Ben normal dc motor ile sag sol ve hiz kontrolu olmadan yani tam ileri ve tam geri olan bi alici verici yapmak istiyorum .Hazir kartlar varmidir ? Yoksa parcalari kendim mi aam gerekiyir ? Pic e gerek var mi ?
YanıtlaSilTam ileri ve tam geri yapmak için motorun dönüş yönünü değiştirmen gerekir yani motorun besleme polaritesini değiştirmen gerekir.pic kullanmadan nasıl yaparsın bilmiyom ama pic ve motor sürücü kullanarak rahat bi şekilde yapabilirsin.
YanıtlaSilmerhabalar eser,
YanıtlaSilyukarrıdaki kodları hex e çeviremiyorum, hatalarla karşılaşıyorum. compiler bilgim çok iyi değil. düzeltemedim bir türlü kendi başıma. rica etsem hex kodlarını mail atman mümkün müdür ?
merhaba, güzel bir paylaşım olmuş, teşekkürler emeğinize sağlık. Benim böyle bir devreye ihtiyacım var. çok uzun zamandır elektronik ile uğraşmadığım için yapabileceğimi düşünyorum. Sistemi kendi yaptığım bir gemide kullanacağım. Mekaniğini çözebilir fakat bana motorları kumanda edecek sistem gerekli. Bu sistemi açık alanda 100 metreye kadar çalışabilecek şekilde ücreti karşılığında yapabilirmisini? Ve bana maliyeti ne olur? Bilgilerini bekliyorum. Teşekkürler - Fatih
YanıtlaSilMerhaba ilginize teşekkür ederim.Size yardımcı olmak isterdim fakat uğraşmam gereken başka işler olduğu için zamanım yoktur.Ama sorularınız olursa hassasiyetle ilgilenirim , yardımcı olmaya çalışırım.Teşekkürler.
YanıtlaSilmerhaba çok güzel bir çalışma olmuş elinize sağlık bu projeyi bende uygulamak istiyorum.gördüğüm kadarıyla anakartın isis devresini koymuşsunuz rica etsem kumandanında isis devresini koyabilirmisiniz? hatta mümkünse anakart ve kumandanın ares görüntülerinide ekleyebilirmisiniz.teşekkürler kolay gelsin
YanıtlaSilMerhaba teşekkürler.Yukarıda ki isis devresinde kumanda ve alıcı devresi birlikte bulunmaktadır.Devrede üstte bulunan mikrodenetleyici verici, altta bulunan mikrodenetleyici ise alıcıdır.Verici olan mikrodenetleyicinin TX pinini doğrudan alıcı olan mikrodenetleyicinin RX pinine bağladım.Tabi bunu isisde simülasyonu gerçekleştirmek için yaptım.Gerçekte ise TX'e verici modül , RX'e ise alıcı modül bağlanacaktır.Kolay gelsin.
YanıtlaSiljoystik ileri geri sağ sol mu yapıyor? toggle anahtarın göevi ne isisde göremedim aynı zamanda buzzer ı da isisde göremedim yardımcı olursan sevinirim.
YanıtlaSilJoystick sağ-sol ve ileri-geri kontrolü yapıyor. Mikrodenetleyici ADC(Analog dijital converter) üzerinden joystick'in içinde bulunan iki adet potu okumakta ve dijitale çevirmektedir.Potlardan biri sağ-sol diğeri ise ileri-geri kontrolü yapmaktadır.Toogle anahtar vites görevi görmekte toggle aşağıda ise motor yapabileceği maksimum hızın %50 sine kadar yükseliyor, toggle yukarıda ise motor yapabileceği hızın %100'ne kadar ulaşıyor.Buzzer ise joystick'in ortasında bulunan butona dokununca korna görevi görüyor.Bunları isise koymadım.Ama toggle bağlantısı normal buton ile aynı buzzerın bağlantısı ise led gibi mikrodenetleyicinin herhangi bir pinine bağlayabilirsin.
YanıtlaSilmerhaba eser bey ,
YanıtlaSilben bu projeyle ilgili olarak şunu sormak istiyorum ortalama maliyeti ve proje süresi nekadar ?
Merhaba.Ortalama proje maliyeti 200-250 TL civarıdır. Tabi proje çalışmaları sırasındaki aksilikleri hesaba katmazsak.Proje süresi için kesin bir şey söyleyemem.Fakat daha önce pwm,adc,step motor ve rf modüller kullandıysanız çok uzun bir süre almayacaktır.
YanıtlaSilarkadaşım slm adım gürcan rf kumandalı araba projeni gördüm programı derledim ama similasyon yaptım sürekli sinyal gönderiyor sence nedendir bir bilgi verirsen sevinirim
YanıtlaSilnot: sadece normal motor çalışıyor sürekli
Merhaba. DC motoru kontrol eden pot'un konumu %50 de ise motor hareket etmez,eğer %50'den büyükse ileri yönde döner, %50'den küçük ise geri yönde döner.Eğer sürekli sinyal gönderiyorsa potun konumu %50 den farklıdır ki bu olağan bir durumdur.
YanıtlaSilDenedim arkadaşım ama olmadı sanırım işlemci ayarlarında bir sıkıntı var sanırım bana sendeki dosyayı bana göndermen munkunmudur acaba gurcankas@hotmail.com benim email adresim
YanıtlaSilslm arkadaşım bana bir yardımcı ol bu konuda olumlu yada olumsuz bir haber verirsen sevinirim .
YanıtlaSilMerhaba Gürcan proje dosyalarına videonun altından ulaşabilirsin.
YanıtlaSilarkadaşım çok oldum biliyorum ama bilgim olmadığından sana soruyorum dosyaları indirdim derliyorum bu hatayı veriyor unknown keyword in #fuses 'WRT_50%' sitelere baktım ama birşey göremedim sence nedendir
YanıtlaSilEğer direk programı derlediysen projenin kayıtlı olduğu yer ile ilgili hata verebilir.Ama yukarda belirttiğin hata bununla ilgili değil galiba.Siz PIC C Compiler derleyicisinde yeni bi proje oluşturup .c dosyasındaki kodları oraya kopyalayın ayrıca .h dosyasında baud ayarı yer almaktadır o ayarlarıda aynısı gibi yapın öyle derleyin.Bunları alıcı ve verici projeleri içinde ayrı ayrı yapın.
YanıtlaSilKolay gelsin.
Ccs c kulanıyorum 5.00 versiyonu ama demo sürümü normalde bütün dosyaları derliyor sadece bunda hata veriyor yeni projede oluşturdum ama olmadı senide ugraştırıyorum kusurabakma
YanıtlaSilslm eser sana birşeyler sormak istiyorum step motor ile ilgili bana bir msj atarmısın.
YanıtlaSilÇok saolun projenin çok güzel isime çok yaradi öncelikle araba kaç metre uzaklıktan çekiyor
YanıtlaSilEser bey elinize sağlık projenize diyecek birşey bulamıyorum, benim kafama takılan verici taraftaki kodlamada veriyi nasıl gönderdiniz sadece putc ile mi bu iş oluyor hangi porta göndereceğini nereden biliyor? Bu konuda aydınlatırsanız çok sevinirim.
YanıtlaSilİlginize teşekkürler.Verici kısmında putc(); komutu ile önce preamble ardından sencron ardından da belirlediğimiz data gönderilmektedir. Gönderilen data mikrodenetleyici içinde yer alan TXREG register'ina kaydedilir.Herhangi bir porta direkt gönderilmez ancak alıcı tarafında getch(); komutu ile okunabilir.Eğer bu veriyi bir porta yüklemek istersek şu şekilde yapabiliriz.
YanıtlaSil==> output_b(getch()); // Burada okunan veri b portuna transfer edilmiştir.
Ellerinize saglik guzel bir proje
YanıtlaSilaracin ustundeki buton ne ise yariyor
birde kac metre uzakliktan cekiyor
Devrenin semasinida koya bilirmisiniz internete yada mail felan atabilirmisiniz simdiden tessekur ederim ilgilendiginiz icin
Teşekkürler.Aracın üzerindeki buton reset butonudur. Ürün datasheetinde 150 metreye kadar iletişim sağlanabildiği belirtilmiş.Yukarıda ARX-34C ATX-34S modüllerinin datasheetleri yer almaktadır.Orada alıcı ve verici modüllerin gerekli bağlantıları yer almaktadır.
YanıtlaSilAracin devre semasini gondere bilirmisiniz
Silisis ares dosyalarını yada projesini yayınlaya bilirmisiniz
YanıtlaSilİsis dosyasını videonun altına koydum.
YanıtlaSilMerhabalar, projeniz çok ilgimi çekti. Birşeyler öğrenmek için bu çalışmayı gerçekleştirmek istiyorum. Blogunuzda sorulan sorulara çabucak cevap yazdığınızı gördüm. Acaba proje ile ilgili bir sorun yaşarsam size mail adresinizden ulaşabilir miyim? Benim mail adresim: oguzhantgn@gmail.com cevabınızı bekliyorum. Şimdiden teşekkürler!
YanıtlaSilMerhabalar. Tabi proje ile ilgili bir sorunla karşılaşırsanız size yardımcı olurum. İnşallah faydalı bir çalışma olur sizin için. Mail adresimden ulaşabilirsiniz bana. Teşekkürler. Kolay gelsin.
YanıtlaSilmerhaba okulda rf devreleri ile ilgili herhangi bir devre yapın denildi ve ben sizin projenizi gördüm ve beyendim yapmak istedim ancak sayfaya atmış olduğunuz isis programındaki şemaya baktığımda yapmış olduğunuz plakette fazladan eleman yerleştirmişsiniz biz bu bağlantıyı nasıl yapabiliriz veya ayrıntılı şemalarını atarmısınız mail adresim hakan_dogan_24@hotmail.com şimdiden teşekkür ederim
YanıtlaSilMerhaba rf alıcı ve vericiyi hazır modül olarak aldım. İsisin kütüphanesinde bu modüller bulunmadığı için mikrodenetleyicilerin RX ve TX uçlarını doğrudan birbirine bağladım. Bu devreyi programın çalıştığını görmek için kurdum. Yukarıda ARX-34B2 ve ATX-34S modüllerinin datasheet i bulunmaktadır. Orada gerekli devreyi bulabilirsin. Kolay gelsin.
Silmerhaba , şimdi benim demek istediğim isis programı şemasında verici devresinde 2 adet 220uf kondanstör, x1 cristal, 2adet ayarlı direnç 1 adet 1k direnç, entegre var ama yaptığınız verici plaketinde -PİC16F877A
Sil-ATX-34S rf verici modül
-4MHz kristal
-22pF kondansatör
-100nF ve 470uF kondansatör
-7805 transistör
-Joystick
-Toggle anahtar
-Buton
-10K direnç
-1K direnç
-330ohm direnç ve led
-Klemens var,
alıcı modülünde 2 adet kondanstör x2ckistal 1adet buton, 1k direnç 2 tane entegre 2 adet motor var sizin yaptığınız plakette, -PİC16F877A
-ARX-34B2 rf alıcı modül
-4MHz kristal
-22pF kondansatör
-100nF ve 470uF kondansatör
-7805 transistör
-L298 Dc motor sürücü
-12v 1500Rpm DC motor
-ULN2003A entegresi (Step motor sürmek için)
-Unipolar step motor(M35SP-7NP)
-330ohm direnç ve led
-Buton
-Klemens
-Buzzer (arabanın kornası)
var biz bunu ares programından plakete çıkarmak için farklı bir cizimmi yapcaz sizin plakette fazladan eleman oluyo bunu anlayamadım yardımınız için teşekkür ederim.
Merhaba. Devrede kullanılan motor sürücü 12V ile beslenmektedir. Malzeme listesinde ki fazla malzemeler ile regülasyon devresi yapılıp 12V 5V a düşürülmüştür. Çünkü mikrodenetleyici 5V ile çalışmaktadır. Regüle için 7805 transistör kullanılmıştır. 7805 çok bilinen bir transistördür. Örnek bir 7805 regüle devresi bulup yukarıdaki devreye eklemeniz gerekecektir. Kolay gelsin.
Silmerhaba öncelikle yardımlarınızdan dolayı teşekkür, ederim son olarak bu yapılan plaketlerin regülasyon devreleriyle birlikte çizilmiş olarak bir fotoğraf alabilirmiyiz.
Silabi sağ sol yön hareket parçasını bulamadım nerden bulurum bid ben hızlı bişey yapcam motorda yardımcı olurmusun hangi motoru takıyım
YanıtlaSilmeraba acıl yardımız gereklı alıcı verıcı bı odevım var 1 km mesafelı acaba ne yapmalıyım cok acıl beklıyorum
YanıtlaSilMerhaba. Benim kullandığım modüller 1 km mesafe için uygun değil sadece 50-100 metreye kadar haberleşebilirler. Udea nın 1km için farklı alıcı verici modülleri vardır. Onlara bakmanızı öneririm.
SilBu devrede 12V 2500 RPM motor kullansak sorun olur mu
YanıtlaSilSorun olmaz kullanabilirsiniz.
Sildevre plaketini hazırlamak için hangi programı kullanıyorsunuz.Yada program önere bilirmisiniz.
SilBen ares kullandım.
SilÇalişmiyor Devre Modülleri Ne Şekil Bağlarsam Bağlayayım Çalişmiyor http://i.hizliresim.com/XBMNX5.jpg
YanıtlaSilModüllerin bağlantısı ürün datasheetinde yer almaktadır. Datasheette ki gibi bağlantı kurarsanız ve de programı doğru bir şekilde derleyip pic'e atarsanız çalışacaktır. Ayrıca devrenizde alıcıdan pic'e iki kablo bağlamışsınız. Alıcının sadece Dout pini pic'in Rx pinine bağlanacak.
SilBen bu devrede 12V 7Alik aku kullansam sorun olurmu herhangi bir devre elemani zarar gorurmu
YanıtlaSilVe siz kac volt ve amperlik aku kullandiniz.
kardeşim öncelikle verdiğin bu bilgiler için tesekkür ederim. benim sana bir sorum olacaktı. Bu devreyi yapmayı dusunuyorum. elektronikçiyim bende ''picbasic'' dilini biliyorum ''c'' dilinden hiç anlamıyorum. İsislerde toggle anahtarı ve far butonlarının vericide hangi pinlere baglandını gostermemıssın alicıda da hangileri cıkıs söylersen ,hemen yapmaya baslıyacagım :) tekrardan tesekkurler
YanıtlaSilBen teşekkür ederim.
Silkorna butonu ( joystick in ortasındaki buton) --> verici kartında RC3 pinine,
toggle anahtar --> verici kartında RD1 pinine,
far anahtarı --> verici kartında RD0 pinine,
far ledleri --> alıcı kartında RD2 pinine ve
buzzer(korna) --> alıcı karında RD3 pinine bağlıdır.
İyi çalışmalar. Kolay gelsin.
Teşekkür ederim kardeşim
YanıtlaSilBu yorum yazar tarafından silindi.
YanıtlaSilHocam yardimlariniz icin cok saolun ama bi sorum vardi bu devrenin isis proteus sun kacin ci surumunde cizdiniz benim pc acilmiyor error veriyor
YanıtlaSilSizde sağolun.
SilProteus 7 professional.
Kardeşim tekrar rahatsız edicem ama yorumları okudum kafama takılan birşey oldu. Kodları derleyin demissin. Senin paylaştığım hex dosyalarini direk pice yükleyip kullanabilir miyim. Derleme felan yapmadan. Herhangi bir sıkıntı yapmaz sanırım
YanıtlaSilHex dosyalarini doğrudan pice yükleyip kullanabilirsiniz.
Silmerhaba eser bey hocamızda okulda bizden step motoru rf alıcı verici ile sürmemizi istedi ama buton ile saga sola ve dur butonu olacak dedi birde hız ayar butonları olacak dedi devreyi çizdim ama yazılımı bir türlü yazamadım okulda bize pic basic öğretiyorlar ama şifreli kilit falan çoğu komutu öğrenmedik nasıl yardımcı olabilirsiniz aceba lütfen sizden cevap bekliyorum iyi günler
YanıtlaSilMerhaba. Benim programımda, mikrodenetleyici joystictk den gelen analog değeri ADC ile dijitale dönüştürdükden sonra sağ, sol, ileri, geri ve hız kontrolü sağlanıyor. Sizin projenizde ise doğrudan butonlardan gelen dijital değeri okuyup ona göre sağ, sol, ileri, geri ve hız kontrolü yapmanız gerekir. Pic basic bilmiyorum mikro C kullanıyorum. Fakat dil değişse de program mantığı aynı olacaktır. Butonlardan okuduğunuz veriyi pic in uart haberleşme pinleri üzerinden RF verici modüle gönderirsiniz. Verici modülde bu veriyi alıcı modüle gönderecek. Alıcı modülden de picin uart haberleşme pini üzerinden veri alınacak. Daha sonra bu veriler programda yorumlanıp sağ, sol, ileri, geri ve hız kontrolünün sağlanması gerekir. Kolay gelsin.
Silteşekkür ederim verdiğiniz bilgiler için iyi günler
YanıtlaSilmerhaba bana aresini atabilirmisiniz acaba mahmutfenerli1@gmail.com
YanıtlaSilMerhaba size bir sorum olacaktı bu -ATX-34S rf verici ve -ARX-34B2 rf alıcı'yı kendimiz mi yapacağız ki yapacaksak nasıl yapacağız yardımcı olursanız çok çok sevinirim...
YanıtlaSile mail: aligss_1214_@hotmail.com
Alici verici modullerini hazir alirsaniz daha kolay olur hem zamandan hemde butceden tasaruf edersiniz kendinizin yapmaniz zaman alacaktir bir suru aksilikler cikmasida cabasi tabi hem hazir modullerin boyutu kucuk rahatlikla sigdirabilirsiniz devreye
SilAlici verici modullerini hazir alirsaniz daha kolay olur hem zamandan hemde butceden tasaruf edersiniz kendinizin yapmaniz zaman alacaktir bir suru aksilikler cikmasida cabasi tabi hem hazir modullerin boyutu kucuk rahatlikla sigdirabilirsiniz devreye
SilBu devre semlarını alamıyorum yardım edin.
YanıtlaSilSlayer4440@ gmail.com e postasına atarsanız sevınırım ARES VE İSİS baskı semalarını.
YanıtlaSilESER SENTURK ABİ BANA Bİ YARDIM ETSEN.
YanıtlaSilMerhaba bende bu projeyi yapıcam fakat kondansötrleri nereye ne amaçla bağlıyoruz anlmadım.
YanıtlaSilKondansatorler gerilimi filitre etmek icin takiyoruz
Silhocam bu devreyi bred bord üzerinde kurdum ama ufak sorunları var redüktörlü motorları çalıştırıyorum ileri yapıyorum dönüyor geri yapıyorum çalışmıyor alıcıdaki reset butonuna basınca çalışıyor aynı şekilde ters istikamette öyle birde redüktörlü motora komut verdiğimde step motor kendi kafasına göre takılıyor birde aşırı ısınıyor el yakıyor turbo butonuna basıncada redüktörlü motora gelen gerilim 8-11 volt arası bişi oluyor yardım ederseniz cok sevinirim
YanıtlaSilMALZMELERİN TOPLAMI KAÇ TL TUTTU
YanıtlaSilMALZMELERİN TOPLAMI KAÇ TL TUTTU
YanıtlaSilMalzemeleri toptan almamıştım. Fakat 150 tl civarı harcama yaparsın.
YanıtlaSilhocam biz araba değil ama uçak yapacağız aynı sıstemi kullansak olur mu ?
YanıtlaSilMerhabalar hocam bu projenin ares dosyasını da verebilir misiniz
YanıtlaSilMerhaba, ares dosyası elimde mevcut değil.
YanıtlaSilMerhaba hocam toggle anahtarı mikro denetleyicinin hangi pinine bağlıcaz ve buzzerı
YanıtlaSilbizim toggle anahtar 3 bacaklı nereye takacaz
YanıtlaSilMerhaba,
YanıtlaSilToggle anahtar kumanda devresi üzerinde RD1 pinine, buzzer ise alıcı devresi üzerinde RD3 pinine bağlanacak.
Projede picin konfigürasyon ayarları neden yok
YanıtlaSilYukarıda proje dosyaları bulunmaktadır, dikkatli incelememişsiniz galiba. Orada .h uzantılı dosyanın içerisinde mevcut. İyi çalışmalar.
YanıtlaSilhocam sizden rica etsem bu devrenin ares şemasını benim mail adresime atabilirmisiniz bu benim bitirme projem acil yapmam lazım
YanıtlaSilmail adresim kanldagsuleyman@gmail.com
YanıtlaSilmail adresim kanldagsuleyman@gmail.com
YanıtlaSilAres dosyası mevcut değil bende. Çizmeniz gerekecek kolay gelsin.
YanıtlaSilTahminen para tutar.birde hızlı gidermi
YanıtlaSilKaç para tutar tahminen
YanıtlaSilTahminen 150-200 TL malzemeler tutuyor. Mekanik parçalar iyi olursa yani tekerler ve dişliler birbirine uyumlu olursa gayet hızlı gidiyor.
YanıtlaSilMerhaba, benzer bir devreyi ben de kurdum. Regüle devresinde 7805 aşırı ısınıyor. Siz de bu durumla karşılaştınız mı? Bu konuda ne yapabiliriz?
YanıtlaSilMerhaba..bir konuda yardıma ihtiyacım var.8.4 volt la çalışan uzaktan kumanda lı aracımın devresi geri dönüşümsüz bozuldu.araç kumandası sağlam 27 mhz. başka arabalardan devre denedim ama gücü yetmedi.acaba 8.4 -9 voltluk ileri geri sağ sol çıkışı olan bir alıcı devreyi nasıl temin edebilirim.aramadığım site kalmadı.yardımcı olursanız sevinirim....herkese iyi hobiler...Fatih
YanıtlaSilBen projemde 433 MHz alıcı verici modül kullandım. Mikrodenetleyici aracılığıyla haberleşmelerini sağladım. Sizin dediğiniz özelliklerde bir alıcı devresi ile çalışmadım bundan dolayı size yardımcı olamıyacağım. Kolay gelsin.
Silfatih bey iyi akşamlar biraz geç bir yanıt olacak kusura bakmayın istediğiniz devreyi ücreti mukabilinde ben yapabilirim isterseniz
Silhocam bu L298 motor sürücü yü ner den bulabiliriz bide bu h köprüsüz çalışıyormu yardımcı olursanız mutlu olurum güzel proje bu çalışmanız için teşekkür ederim
YanıtlaSilL298 motor sürücünün içerisinde H köprüsü bulunmaktadır. Elektronik malzeme satan yerlerde bulabilirsiniz L298 motor sürücüsünü. Kolay gelsin. İyi çalışmalar. Teşekkürler.
YanıtlaSilBiz bu projeyi yapmayı düşünüyoruz ama alıcı verici modüllerini bulamadık yardımcı olabilirmisiniz.
YanıtlaSilhttp://www.robotistan.com/rf-1
Silhttp://www.direnc.net/standart-rf-modul
buralardan sipariş verebilirsiniz
http://www.udeashop.com/ARX-34B2,PR-3.html
YanıtlaSilhttp://www.udeashop.com/ATX-34S,PR-2.html
Bu linklerde ki alıcı verici modüller bulunmaktadir.
Projede kullanılan akünün bilgilerini verebilir misiniz.
YanıtlaSilprojede kullanılan akü kaç amper ve motorlar kaç amper güç çekiyor bunun bilgilerini verebilirmisiniz
YanıtlaSilisisde similasyon çalışmıyor nedeni ne olabilir
YanıtlaSilverici kodlarını yazıp kontrol ettirdiğimde putc komutlarının hepsinde hata veriyo bunun nedeni ne olabilir.Yardımcı olursanız çok sevinirim.
YanıtlaSilSelamin aleykum abi bende araba var kumanda devresi lazim araba devresine gerek yokta abi kumanda devresinin plaket üzerine çizilmiş şeklini de eklesen
YanıtlaSilUsta kolay gelsin ben bunu yapacam da üniversite okuyom birde bu araca sensör ekleyeceğim engel gördüğü zaman dursun dedi kumandaya lcd olacak hızı gösterecek hoca bunları ekle dedi bunlar için bana bir kod söyler misiniz ben kod yazmayı bilmiyorum da o yüzden yardımcı olur musunuz He birde çizilminş atarsanız sevinirim
YanıtlaSilprojeni yapabildin mi bende aynı senin durumundayım yardımcı olurmusun ?
SilBana uzktan kuandali arabanın ileri geri kontrolunu anlatir misin
YanıtlaSilBana uzktan kuandali arabanın ileri geri kontrolunu anlatir misin
YanıtlaSilAbi benim rc arabam var anakartını yanlışlıkla kısa devre yaptım çalışmadı ön ve arka motoru çalışıyo bu devreyi bidaha yapıp videoya çekermisin nolur abi.
YanıtlaSilselam üstadım ben bu devreyi yapıp gerekli malzemeleri toplarım montajınıda yapabilirim fakat bu devrede kullandığınız ARX-34B2 kısa mesafeli diyor bana minimum 800m 1000m lazım hatta geri gitme özelliğinin olmasına gerek yok bununla ilgili nasıl yardımcı olabilirsiniz
YanıtlaSilisis devresinden başka rf modülleriyle bağlantısının olduğu başka bi devre şeması var mı ?
YanıtlaSilDevre şemasını alabilirmiyim rica etsem .unlus442@gmail.com
YanıtlaSilüstad hangi programı kullandın bu kod için ben microc de çalıştıramadım programlama konusunda da zayıfım
YanıtlaSiltanımlayıcılarını da atabilirmisin
YanıtlaSilccs c de yazıldı bu program mikroc değil.
YanıtlaSiliyi günler programlar çalışmıyor sizce nedeni ne olabilir
YanıtlaSilhocam sağ sol bitürlü çalışmıyor onun hariçinde herşey güzel step motorum sağlam test ettim sorunu birtürlü çözemedim
YanıtlaSilve bukadar zaman sonra ilgilendiğiniz için helal olsun
YanıtlaSilEser hocam paylaşımınız için teşekkür ederim.Sorum şu ki kullandığınız step motor yerine de dc motor bağlasak kodda nasıl bir değişime gitmek gerekir.Doğrult komutu olmasına gerek olmadan yani 2 tane dc motorun hız kontrolü yapacak şekilde.
YanıtlaSilEser hocam 2 adet dc motorun hız ve yön kontrolü olacak şekilde nasıl bir düzenleme yapabiliriz?
YanıtlaSilMerhaba. Bu dc motorlarda sadece hız kontrolü yapabilirsiniz. Yön kontrolü için step motor yada servo motor kullanmanız gerekir. İyi çalışmalar.
YanıtlaSilCevap verdiğiniz için teşekkür ederim.Sizin paylaştığınız devre de ve yazılım da L298n ile sürdüğünüz dc motor yön ve hız kontrolü yapıyor.Yani ileri ve geri diğer anlamda yön oluyor.Aslında yardımınızı tam olarak istediğim konu 2 ayrı l298n ile sürülmüş(tek l298n olmaz köprü balayacağım) 2 adet dc motorun ileri geri ve hız ayarı.ben bayağı uğraştım kod da ama başaramadım.Bakmak isterseniz paylaşabilirim.
SilHocam merhaba
YanıtlaSilsitenizi tesedüfen buldum ve itiraf etmem gerekirse son zamanlarda gezindigim siteler arasinda sefaf ve bilgi bakimindan en iyi site
size birkaç sorum olacak sakıncası yoksa
DC motorla maximum 2 kg yük tasiyacagim uzaktan kumandali bir arac yapmak istiyorum..arac dedimse oyuncak kücük aractan söz ediyorum
ama pil yada batarya kulanmak istiyorum
1 bobinli dc motorlar var onlari kullandigim zaman istedigim gibi bir arac yapabilirmiyim
2 böyle bir proje yapmam için bana gerekli olan parcalar neler dir
şimdi den teşekür ederim
yüzlerce devre yaptım şu ana kadar çalıştıramadığım olmamıştır.bu devrede direk sizin hex kodunu attım 3 farklı pcb denedim tx ve rx kablo ile bağladım defalarca da bread boardda denedim tık yok.sigorta ayarlarında WRT %50 hatası veriyordu sadece onu silmek zorunda kaldım.ne olduğu ile ilgili birşeyde bulamadım.yoruldum eser hocam emeğiniz için teşekkürler.
YanıtlaSilYaa bende yapıcam ama maliyetini öğrenmek istiyorum
YanıtlaSilMerhaba Hocam,
YanıtlaSilElinize sağlık.Bu projeyi sizin adınızı vermeden bitirme projesi olarak kullanabilir miyim?İkinci sorum önde step motorla teker arasındaki bağlantıyı nasıl sağladınız?Teşekkür ederim.
Merhaba hocam, bende böyle bir proje yapmak istiyorum.bunları kendi çabamla öğrenmek istiyorum.nitekim evde kendi çabalarımla uğraşıyorum.bu devrenin sizdeki son biçimini atabilirm.isiniz(korna veya far eklenmiş hali).
YanıtlaSilfurkanercan1998@gmail.com